Review: Eachine V-tail QX110 brushed quad
Eachine QX110 V-tail is a brushed quadcopter with V-shape tail leg design. Such frame design in theory should improve the YAW performance. This is theory, but in practice not everything is as expected. This quad has several more interesting features – All in One Flight controller board with RX and OSD, programmable LED tail lights and a buzzer. RX is integrated into the flight controller and can be selected between DSM, Flysky and Frsky types. All in all it looks promising, so let’s start our review.
Eachine QX110 came in a box, packed securely.

Package contents:
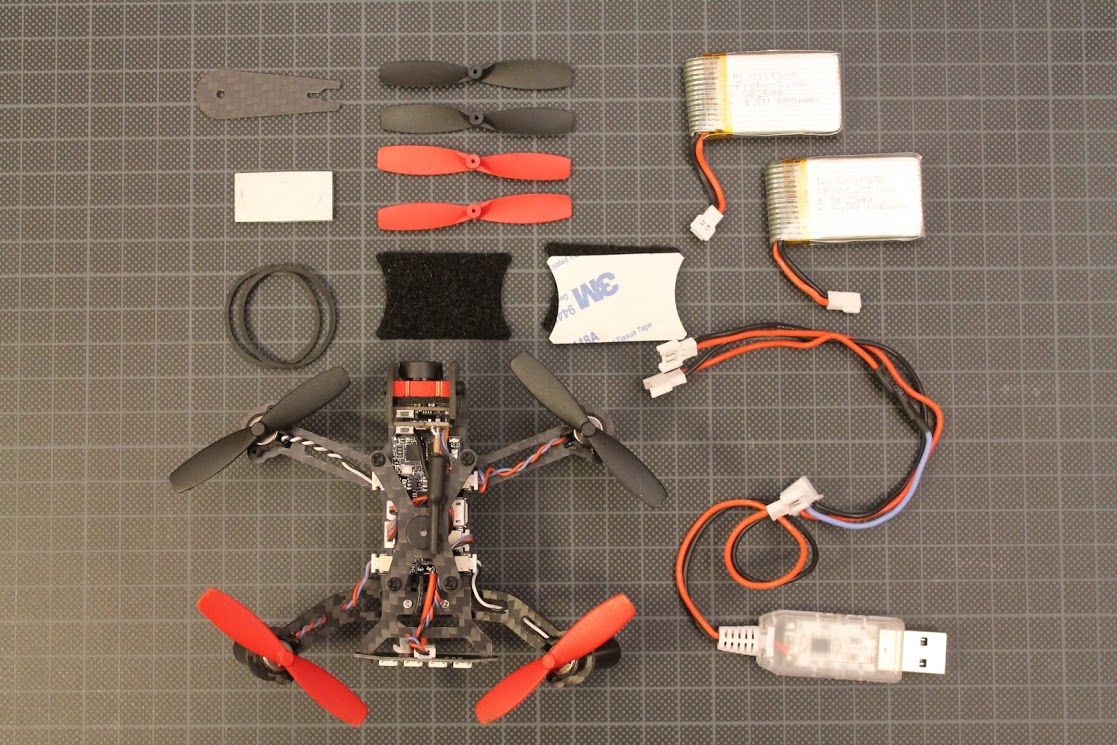
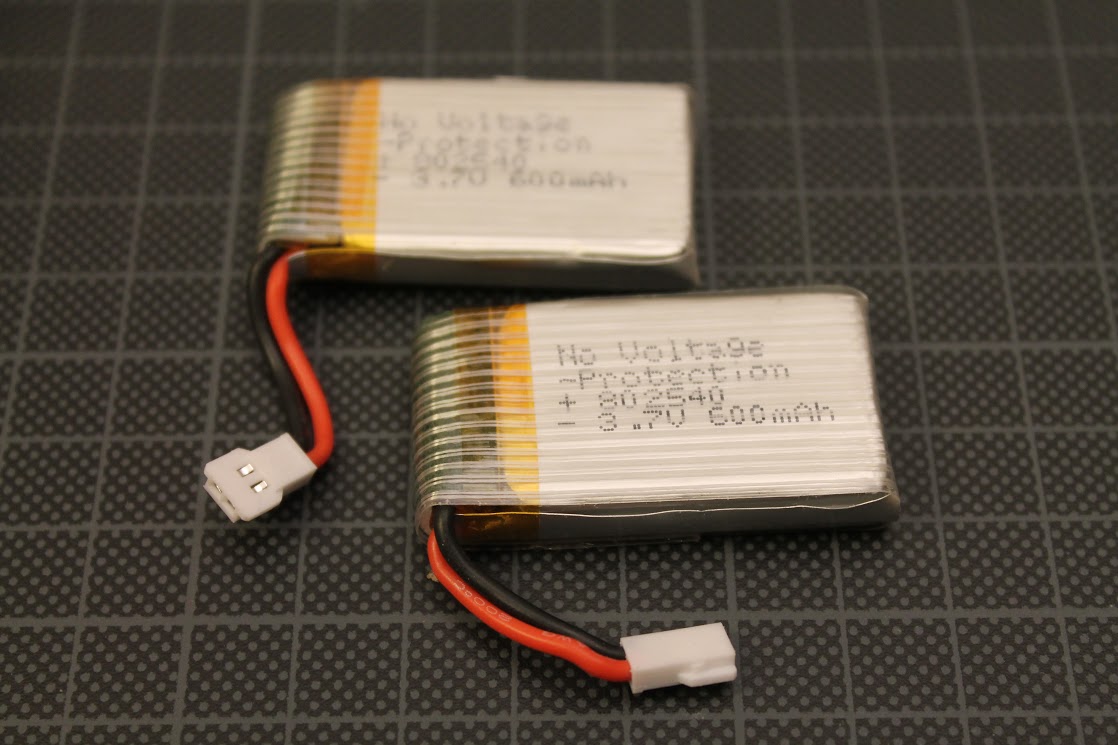
No spare motors were included as stated in the contents list, but comes with a second battery instead. Batteries are 1S 3.7V 600mAh, C rating unspecified, so don’t expect much from these generic ones.
A new charger type is included. Also an additional cable for charging who batteries simultaneously via 2S balance port.
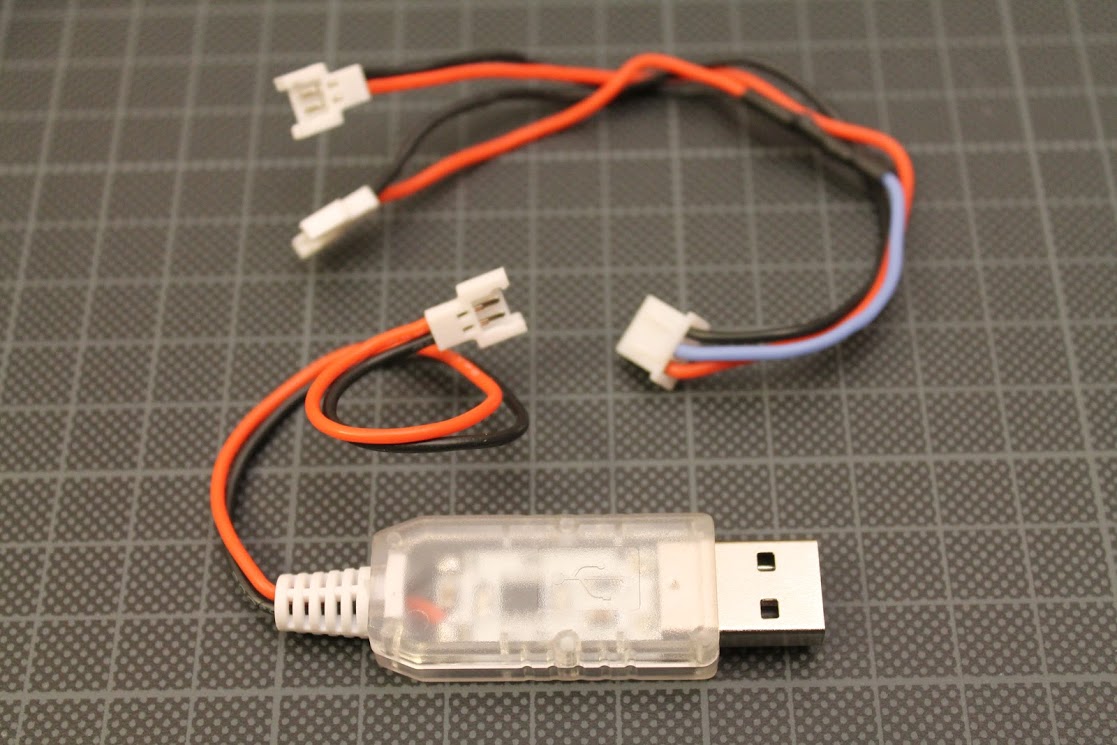
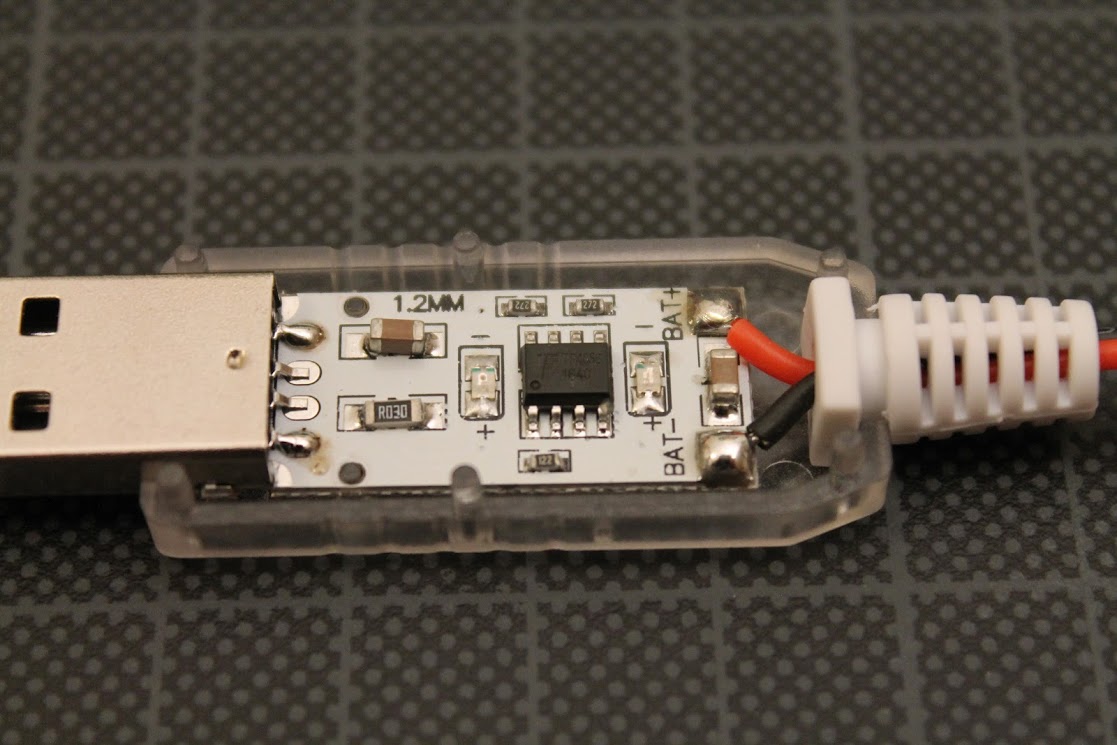
It was curious what is inside this new charger. The charger is based on TP4056 Lithium battery charging controller. According to the datasheet and the actual current setting resistor used, this charger is set to 1A charging current. Good for fast charging as other toy grade chargers supply far less current. Just make shure that your USB power source is capable of outputting at least 1A.
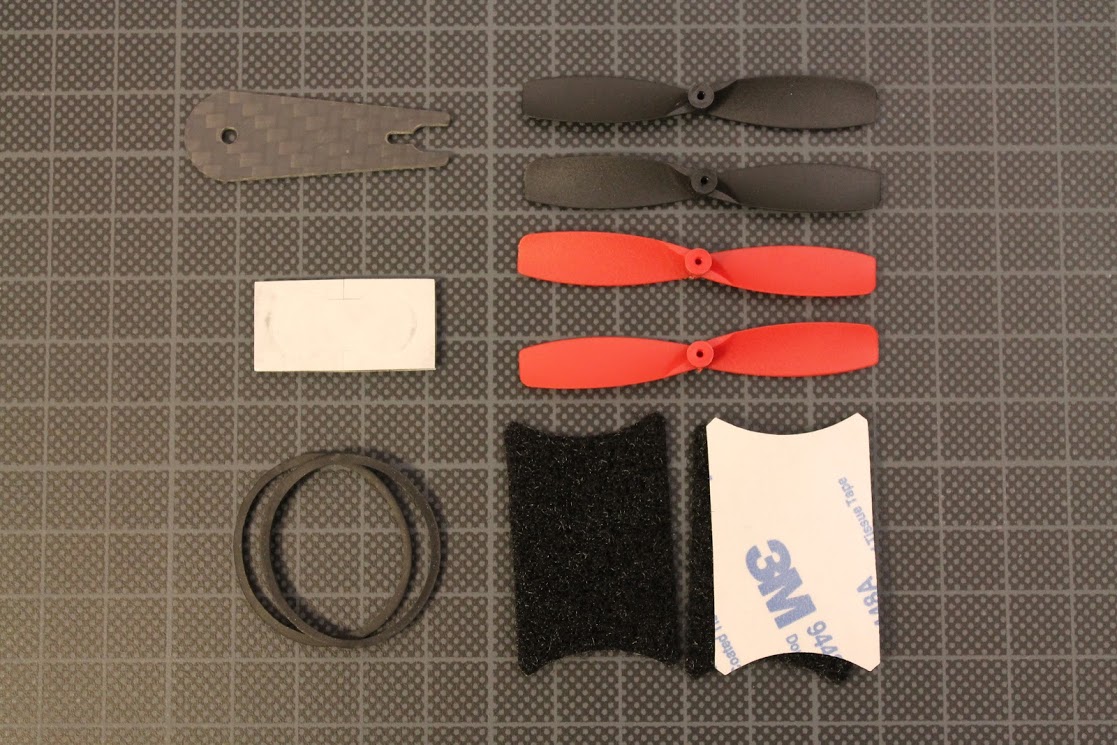
Other accesories included: 2 pairs of spare props, pieces of velcro for attaching the batteries, 2 rubber bands also for securing the batteries, double sided adhesive foam and prop remover tool.
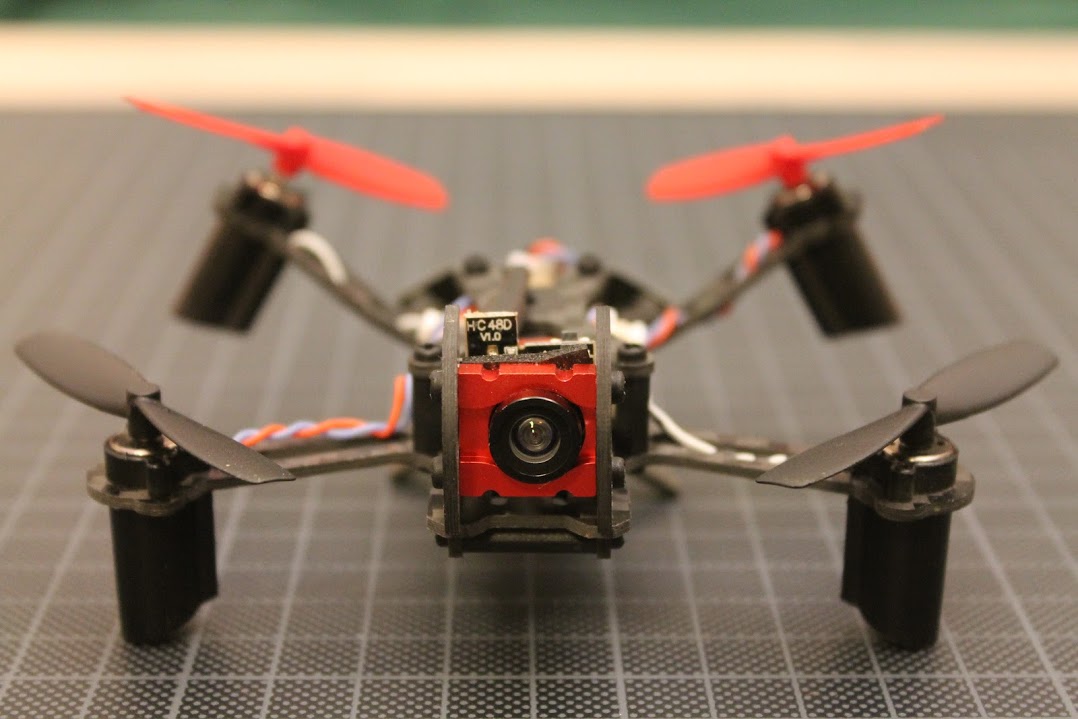
Quadcopters rear legs are angled at about 30 degrees to the frame. This makes somehow cool view, looking at the quadcopter from the front/rear side.

Programmable LED strip with 4 leds is installed on the back of the frame.
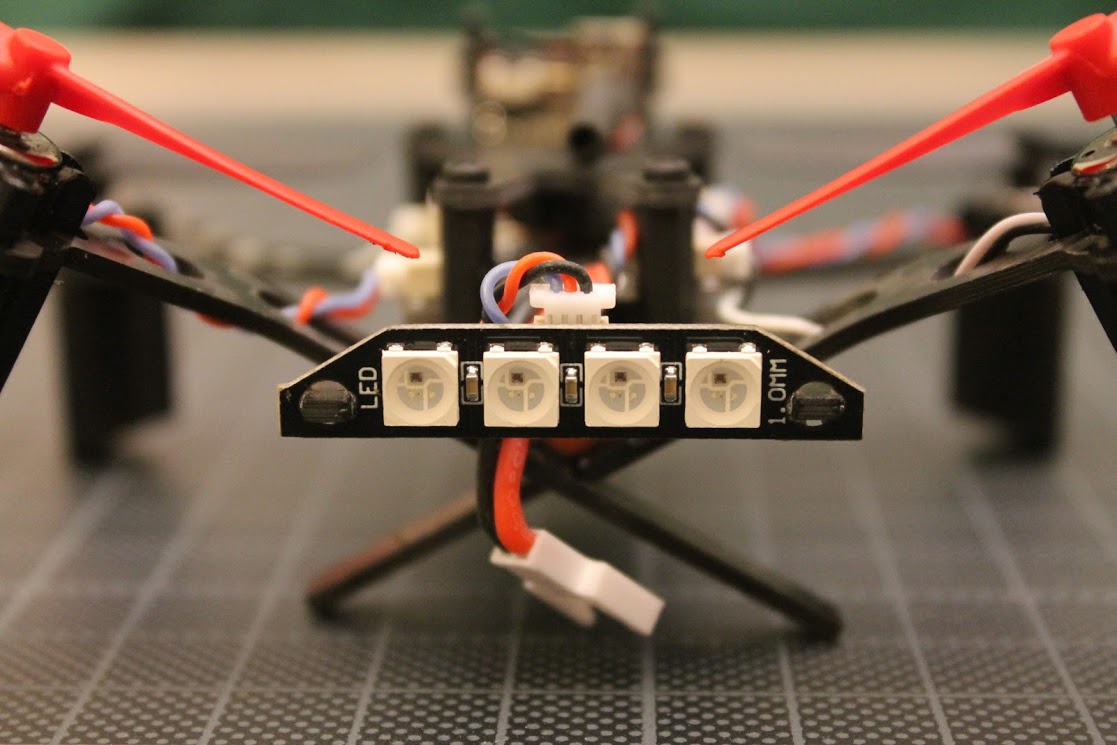
By default they are programmed as Larson Scanner. Leftmost and rightmost leds show turning and the brightness of the two middle ones shows acceleration and brakes.
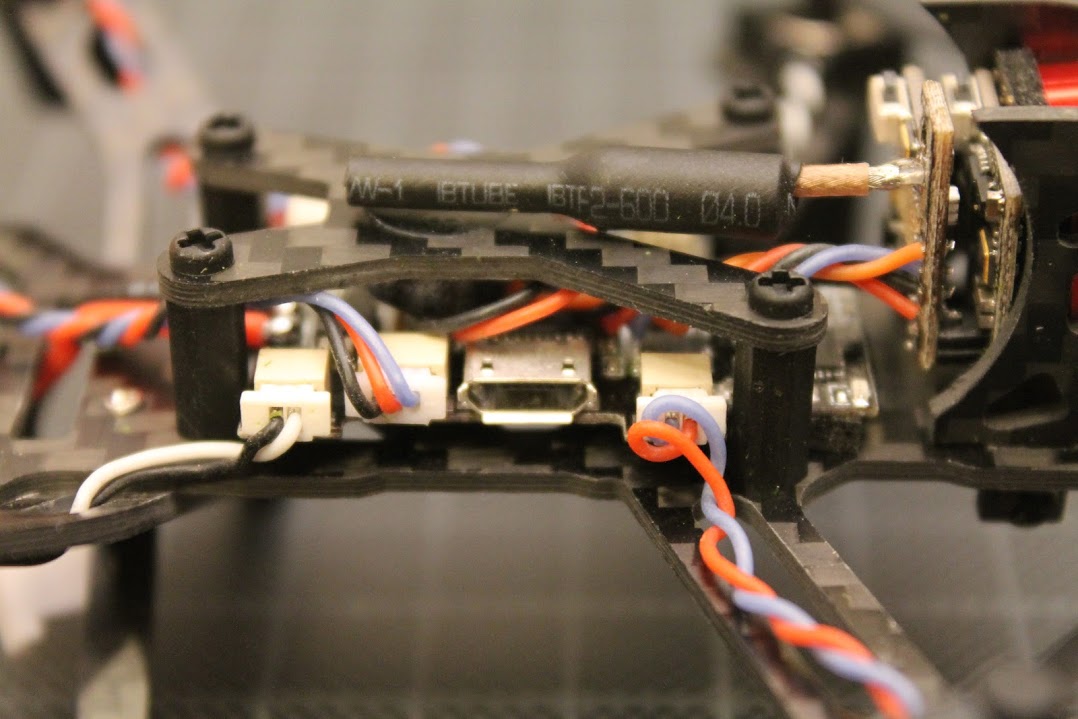
USB plug is located on the right side of the quadcopter. It is easy acessible. Also motor wires have 1.25mm plugs, this makes easy to replace a broken motor.
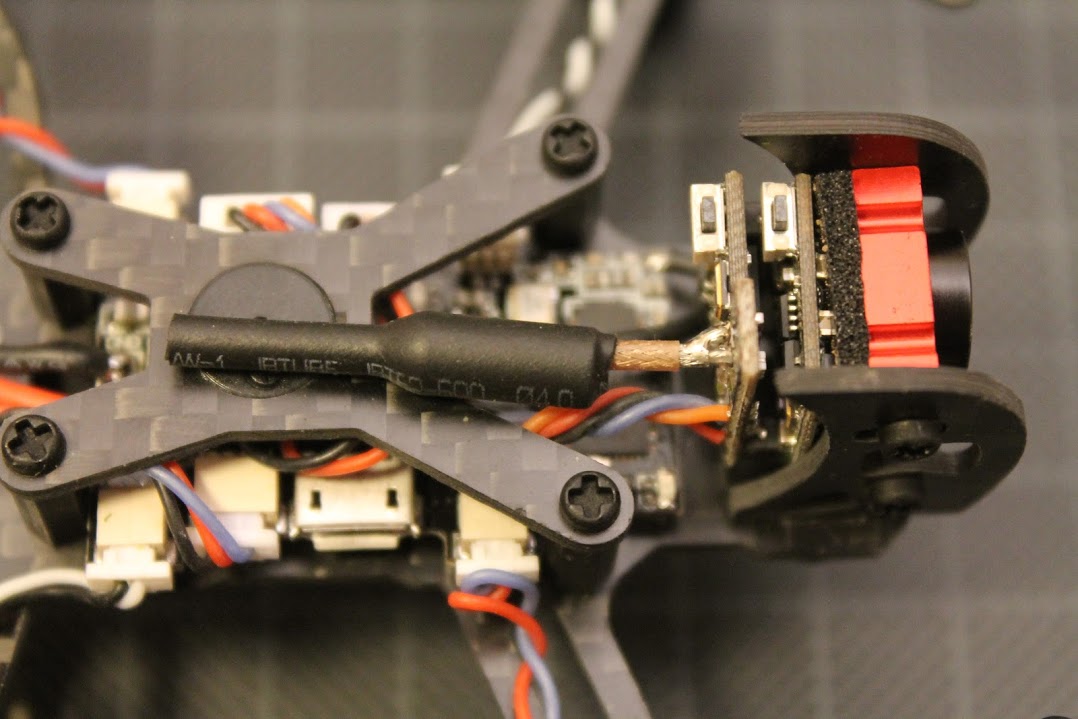
5.8GHz VTX antenna is linear, dipole style. It is soldered in the horizontal orientation ans even touches the carbon frame. This reduces the video reception range and I strongly advise to lift this antenna verticaly.
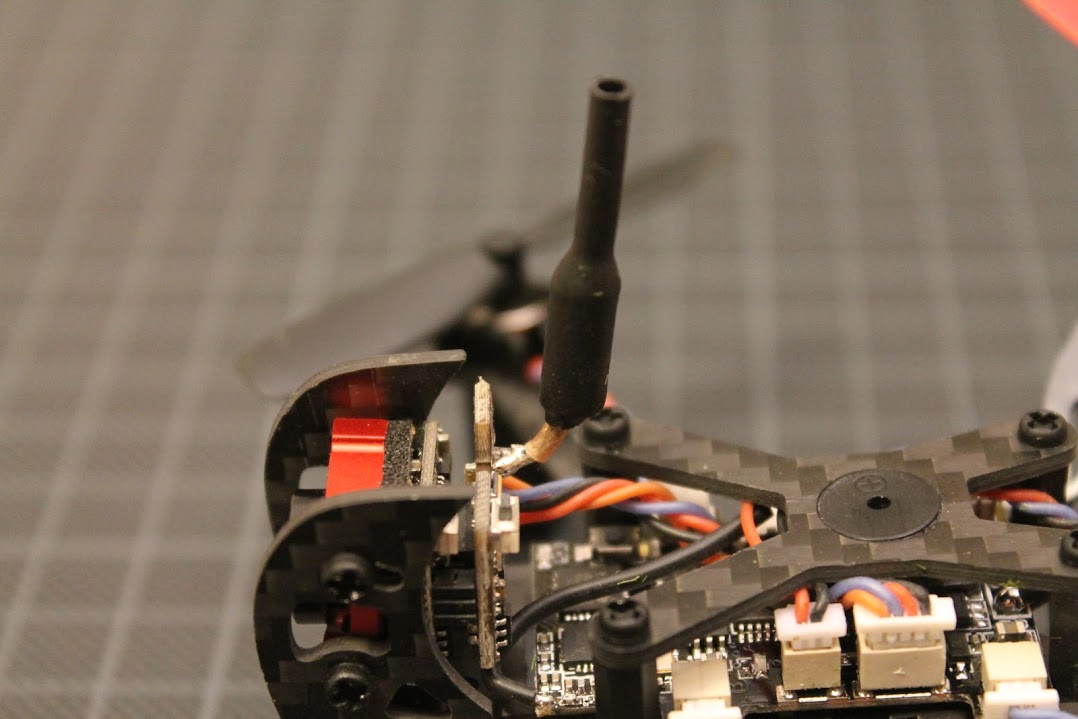
Better antenna orientation.
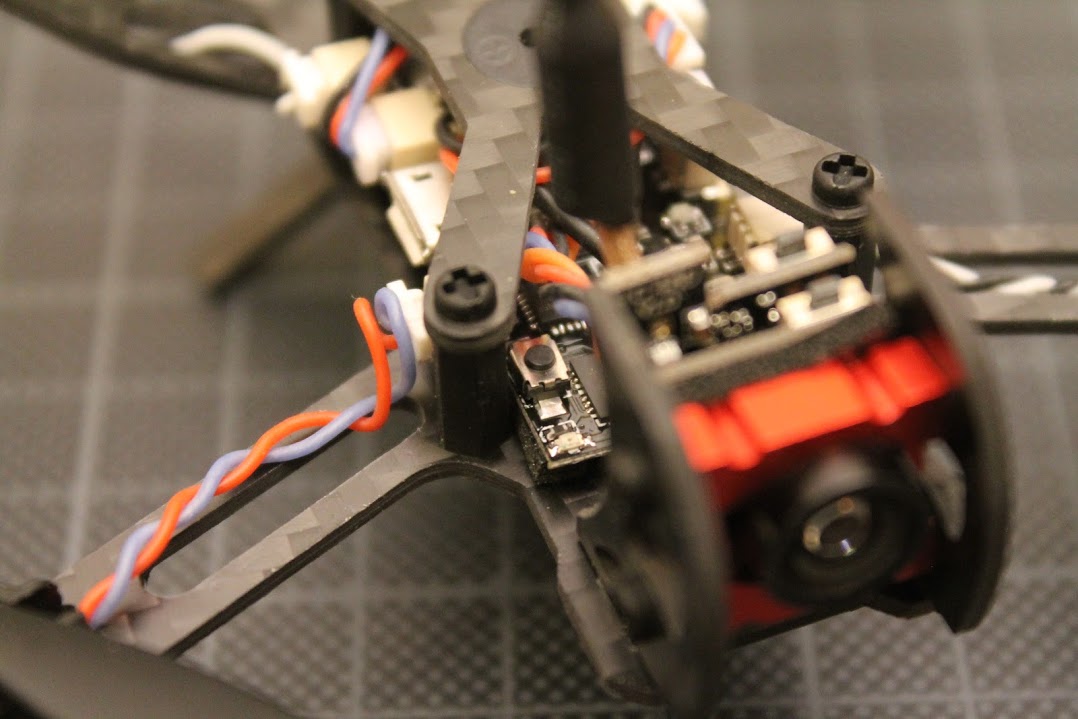
Flysky receiver bind button is right behind the camera. Bind procedure is really simple – just hold the bind button while powering the quad (with battery or USB) and enter the binding mode into transmitter.
Weight without battery is 45,6 grams
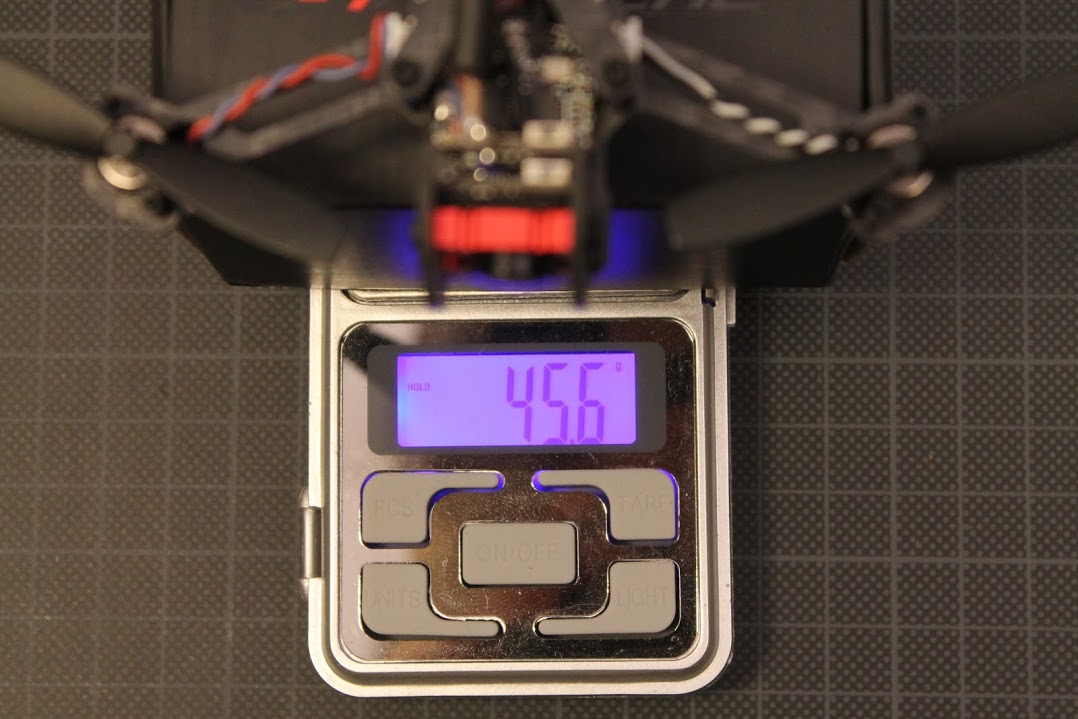
Total weight with battery is 61.6 grams. This is bit heavy, you will not have a super agile quadcopter with this weight.
Firmware
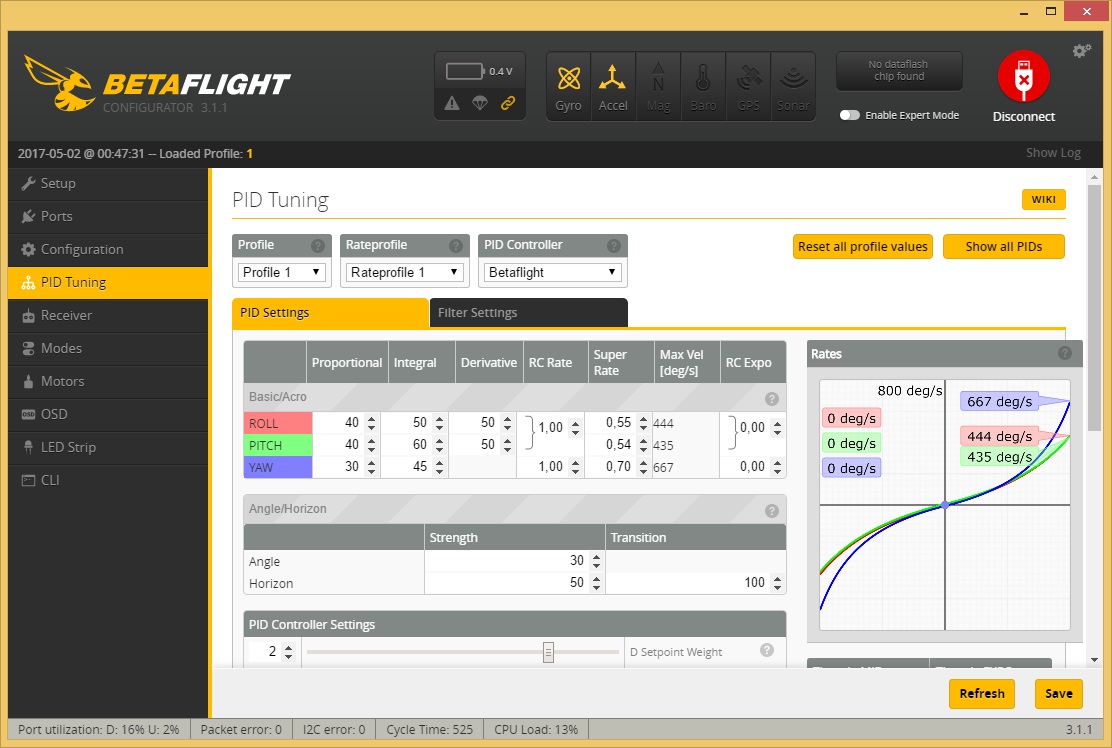
QX110 comes with Betaflight 3.0.1 preinstalled. Default PIDs are tottaly unflyable. Quadcopter wobbles and swings wildly. You get almost uncontrolable behavior on the turns.
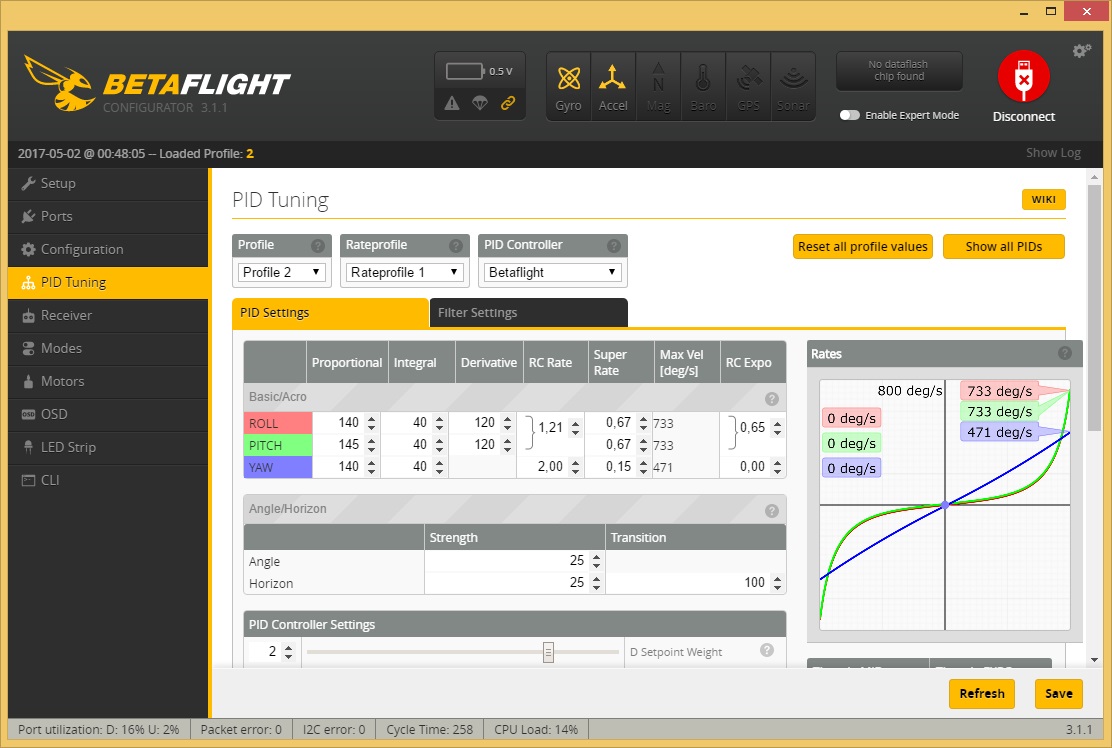
Thanks to the RCgroups user SeByDocKy, we have a better PIDs configuration. With these settings quadcopter is flying times better than default settings right out of the box.
QX110 has an Betaflight OSD. You can configure the screen layout according to your preferences. I advise to disable unneeded information: Rssi Value (Flysky RX version does not have RSSI readings), Crosshairs, Artificial horizont, Horizon sidebars.
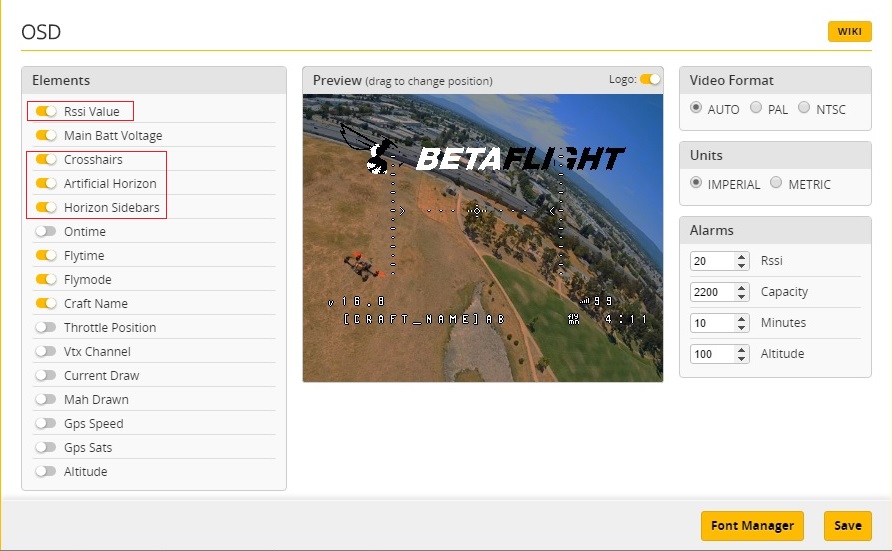
Now you have a cleaner view, without unneeded information on the screen:
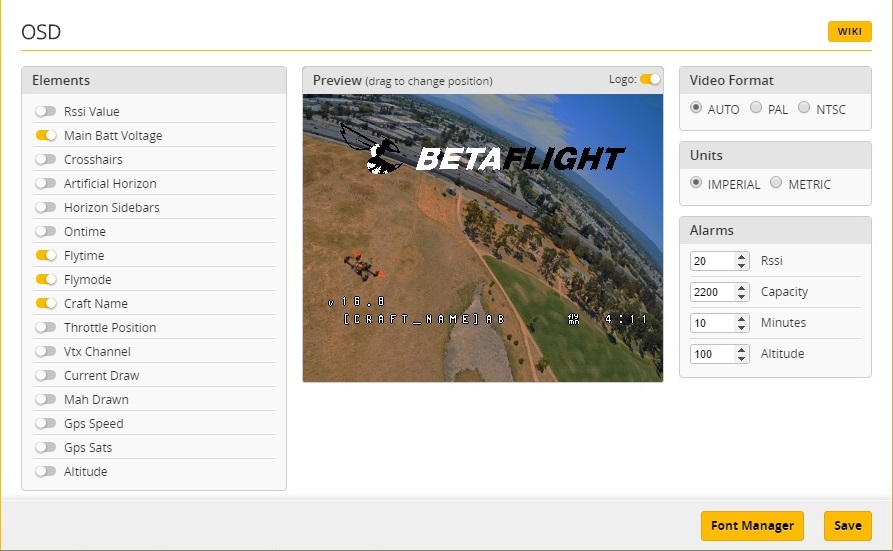

Of course you can enable/disable or even move around the screen any of the OSD data you want.
[To be continued]
-
 Review: MEPS Space SZ F7 Mini FC
MEPS (Mepsking) is a new, but emerging manufacturer, making its mark in the RC
Review: MEPS Space SZ F7 Mini FC
MEPS (Mepsking) is a new, but emerging manufacturer, making its mark in the RC -
 HGLRC Thor Pro parallel charging board
HGLRC Thor Pro charger board is battery parallel charging board with protection fuses and
HGLRC Thor Pro parallel charging board
HGLRC Thor Pro charger board is battery parallel charging board with protection fuses and
Awesome site you have here but I was curious about
if you knew of any discussion boards that cover the same topics
talked about in this article? I’d really like to be a part of group where
I can get feed-back from other experienced people that share the same interest.
If you have any suggestions, please let me know. Kudos!
I would suggest to sign up to the RCGroups discussion board (https://www.rcgroups.com). It is the biggest RC forum in the world! I use it everyday!