Betaflight 4.2 new features and changes
Betaflight 4.2 is near! The Release Candidate 1 is already available. Lets look at what was changed in this flight controller firmware version.
New features and improvements
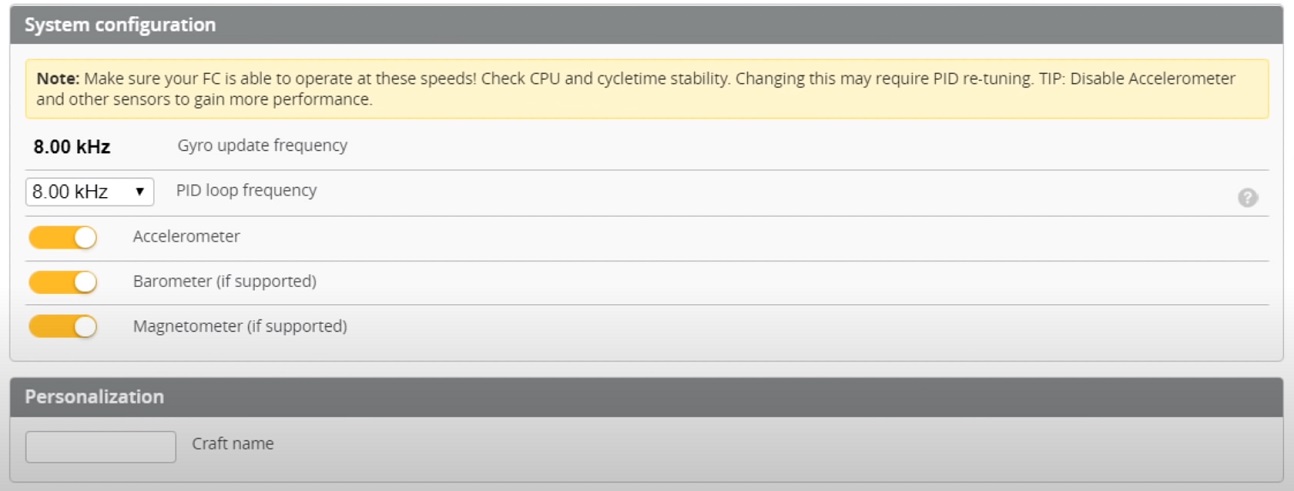
- Gyro loop now always run at the native speed of the gyro. For example common Invensense MPU6000 gyro sampling will always run at 8kHz, for a Bosch BMI160 it will be 3.2khz. It is always best to sample at the full native speed of the gyro. Filtering has been moved to the PID loop rate. The gyro reads every sample and will “downsample” the data to the PID loop if it’s running at a lower multiple (using
pid_process_denom). So if the user has set the PID loop to 4000 then the PID loop will run every two gyro samples for example. Moving the filtering into the PID loop rate saves processing time as it will now run at a lower rate. (#9444).
- NFE Race Mode (#9481)
NFE race mode is a feature originally implemented by @NotFastEnuf in Silverware. All credit goes to him. Recently it gained in popularity so developers decided to port it to Betaflight.
This feature alters the angle mode behavior – for PITCH axis the PID controller calculates setpoint based on gyro only, like in acro/rate mode.
set level_race_mode = ON to enable. Works only in level mode.
- Battery Sag Compensation resulting in more consistent throttle / PID behaviour over for the entire flight time.
Battery Sag Compensation applies an initial motor output reduction when the battery is full, and boosts motor output upwards from that value, during the flight, to compensate for sagging battery voltage as it happens.This provides a more consistent stick feel, both for throttle and PID, over the usable battery voltage range, compensating for loss of performance as the battery sags. The quad will not feel super aggressive at the start of a flight, or dull at the end.
Especially good results can be expected on 1S battery quads.
For quick responses, including to transient falls, for most quads, paste this into CLI and save:
set vbat_sag_compensation = 100- ESC protocol is disabled by default in Betaflight 4.2 . Users must set the correct protocol supported by ESC by themselves.
Betaflight Configurator
- improved target selection in the firmware flasher tab (#1820);
This moves the selection of Unified / legacy target from the board list into the version list:
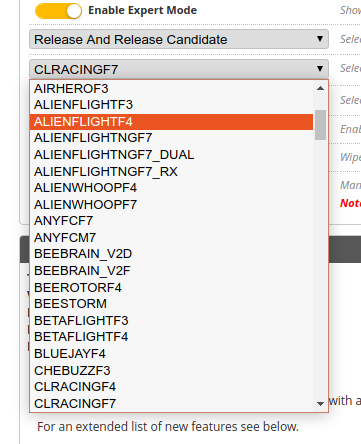
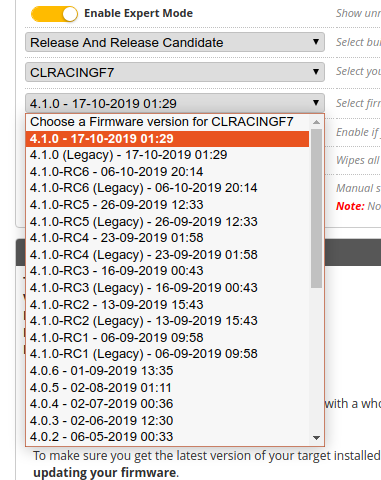
This should address the main reason for user confusion
- improved PID tuning and the tuning sliders (#1839)
When using the PID sliders, the PID values now display a heatmap showing how much they have changed from the saved values. This only affects the main PID values and is only active when using the sliders.

- added a button to bind SPI RX / newer Spektrum RX from within configurator (#1873);

- display the OSD logo on arming (#9244)
Adds osd_logo_on_arming setting with values OFF, ON, FIRST_ARMING (defaults to OFF). Optionally displays the OSD splash logo during the “ARMING” message.
The duration that the logo displays can be set with osd_logo_on_arming_duration which is configured in 0.1s intervals ranging from 5 to 50 (0.5s to 5.0s). The default is 5 (0.5s) to be consistent with the previous “ARMED” splash screen.
New GUI support for the following firmware features:
- added rates type selection (#1909)

- added support for more settings in PID profiles (#1831, #1901)
- Dynamic Idle is now configurable in the GUI (#1905).


Other changes:
- CLI
namecommand removed - I2C connected gyros will not be supported
- 1KHz gyro sampling has been removed.
- For F411 MCU the default
cpu_overclockhas been enabled and set to the lowest value of 108MHz. - D_min and FF improvements
- disarm reason is now logged in the Blackbox log
- ICM42605 gyro and accelerometer sensor support
- Dynamic LPF curves are now configurable
- RC channels preview was added to the OSD
- OSD distance from home alarm
- CMS VTX management improvements
- More GPS options are now settable from Betaflight Configurator
- SOFTSPI feature removed
- support for Redpine protocol for CC2500 RF chipsets
- serial passthrough via MSP
- Added custom (switch) box naming (#9578)
Download Betaflight Configurator 10.7 here: https://github.com/betaflight/betaflight-configurator/releases
Information sources: Betaflight GitHUB (https://github.com/betaflight/betaflight/pulls?q=is%3Apr+is%3Aclosed+milestone%3A4.2+sort%3Acomments-desc)
-
 ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware,
ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware, -
 List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description
List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description