Guide: Troubleshooting arming issues
Quad is not arming, what should I do?
Starting from Betaflight 3.2 (and above), pilot can get more detailed troubleshooting information on the reasons why the craft will not arm via:
- the CLI
- beep patterns
- Betaflight OSD
- Betaflight Configurator
Information about the reasons why craft is not arming is called arming prevention flags. Below you can find the detailed description of the each method.
CLI
One of the easiest ways to check the reason while the quad is on the bench. Just connect the flight controller to the configurator, enter the CLI mode and issue status command. The last line of the status info is arming prevention flags list:
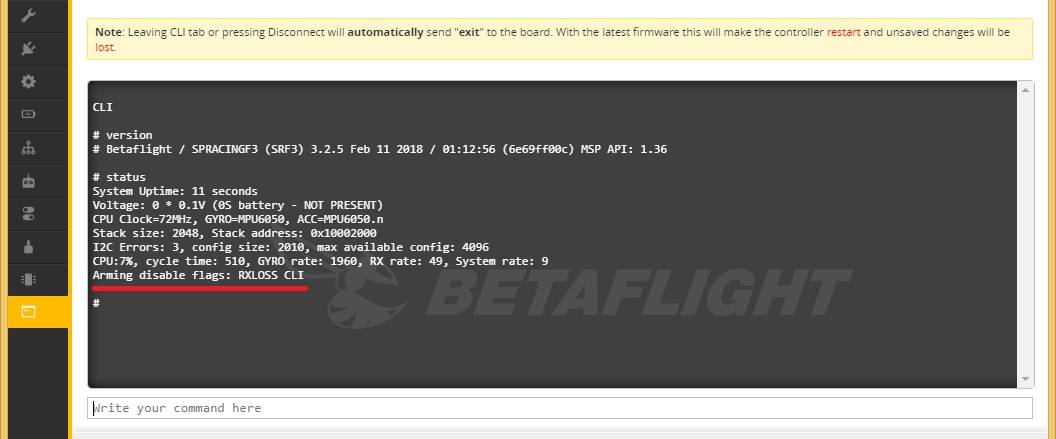
Notes: Refer to the table below for the detailed flags meaning. Arming prevention flags in status command works only from BF version 3.2 and up.
Beep patterns
If your craft has a beeper connected to the flight controller it will emit a warning signal indicating the most important (lowest number) reason why arming is disabled.
The signal is as follows:
- five short ‘attention’ beeps;
- a number of long beeps (may be 0);
- a number of short beeps with long intervals (may be 0).
The arming prevention condition that is active can be calculated as (5 * <number of long beeps>) + <number of short beeps>. For example:
- 1 long and 2 short beeps = 7
- 2 long beeps = 10
Betaflight OSD
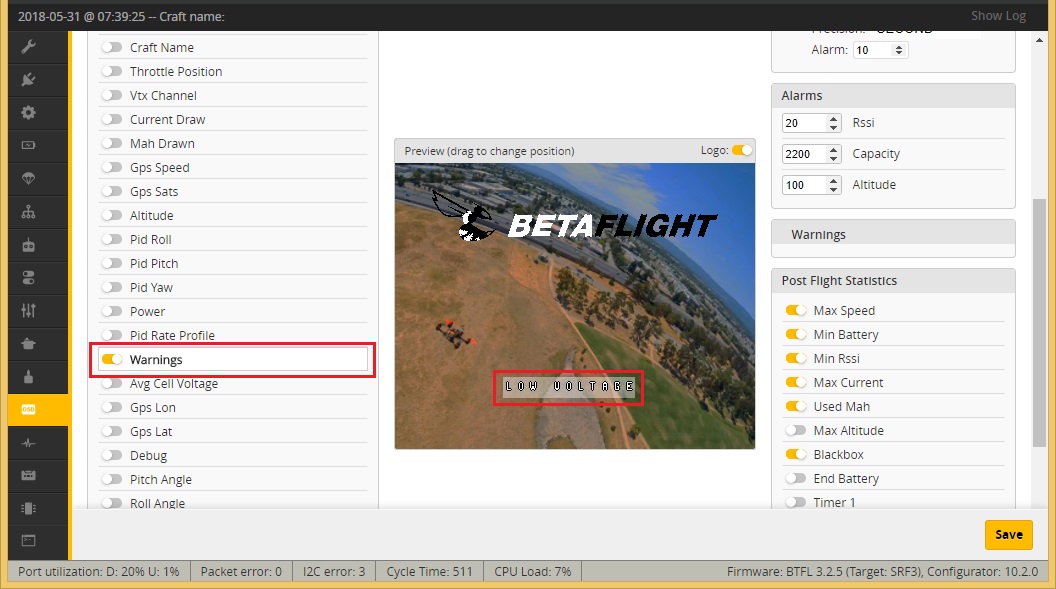
You can see the arming prevention flags right on your OSD screen. Put “Warnings” element on the OSD layot and it will indicate you why craft won’t arm. OSD Warnings element can be enabled from the “OSD” tab:
Betaflight Configurator
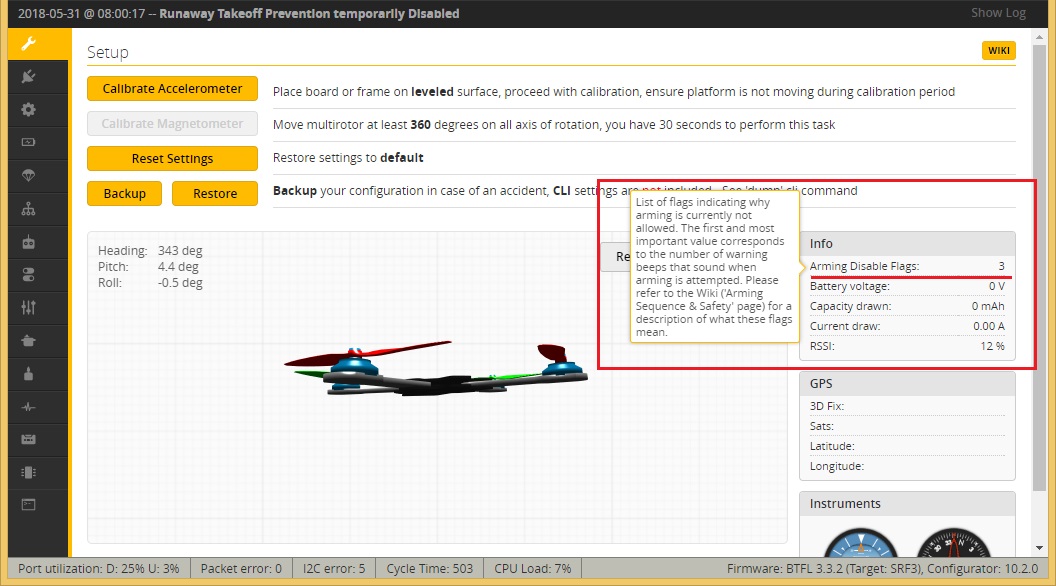
You can also see the Arming Disable Flags in the first configuration tab “Setup”. Notice that it will only show the most important one. This is the same value as the beeper indicates in the case of the arming prevention.
Most common reasons that prevent from arming
- Flight Controller is not receiving/recognizing the signal from RX (flag name: RX LOSS).
- Throttle channel is too high. Check if the throttle stick is at the lowest possible position.
- Craft is not level (enough) (flag name: ANGLE). Level craft to within small_angle degrees. The default is 25 degrees.
- Starting from Betaflight version 3.30 arming is disabled when the flight controller is connected to the Betaflight configurator (flag name: MSP and CLI). This was added in order to keep users from accidentally arming their craft when testing their RX / mode switches with a battery connected. In order to enable arming for bench testing, go to the ‘Motors’ tab and enable the ‘Motor test mode’ switch (REMOVE ALL PROPELLERS FIRST);
CLI/Beep codes and arming prevention flags list table
| Name | Description | Beep code | Required Actions | |||
|---|---|---|---|---|---|---|
| 3.2 | 3.3 | 3.4/3.5 | 4.0+ | |||
NOGYRO |
A gyro was not detected | 1 | 1 | 1 | 1 | You may have a hardware failure, if a previous firmware version works then it may be a firmware issue. |
FAILSAFE |
Failsafe is active | 2 | 2 | 2 | 2 | Rectify the failure condition and try again. |
RX LOSS(1) |
No valid receiver signal is detected | 3 | 3 | 3 | 3 | Your receiver is either faulty or has no link to the transmitter. |
BAD RX(1) |
Your receiver has just recovered from receiver failsafe but the arm switch is on | 4 | 4 | 4 | 4 | Switch the arm switch off. |
BOXFAILSAFE |
The ‘FAILSAFE’ switch was activated | 5 | 5 | 5 | 5 | See FAILSAFE |
RUNAWAY |
Runway Takeoff Prevention has been triggered | 6 | 6 | 6 | Disarm to clear this condition. | |
THROTTLE |
Throttle channel is too high | 6 | 7 | 7 | 7 | Lower throttle below min_check. |
ANGLE |
Craft is not level (enough) | 7 | 8 | 8 | 8 | Level craft to within small_angledegrees (default 25). |
BOOT GRACE |
Arming too soon after power on | 8 | 9 | 9 | 9 | Wait until pwr_on_arm_graceseconds (default 5) have elapsed. |
NO PREARM |
Prearm switch is not activated or prearm has not been toggled after disarm | 9 | 10 | 10 | 10 | Toggle the prearm switch. |
LOAD |
System load is too high for safe flight | 10 | 11 | 11 | 11 | Revisit configuration and disable features. |
CALIB |
Sensor calibration is still ongoing | 11 | 12 | 12 | 12 | Wait for sensor calibration to complete. |
CLI |
CLI is active | 12 | 13 | 13 | 13 | Exit the CLI. |
CMS |
CMS (config menu) is Active – over OSD or other display | 13 | 14 | 14 | 14 | Exit the CMS (or OSD menu). |
OSD |
OSD menu is active | 14 | 15 | 15 | Exit OSD menu. | |
BST |
A Black Sheep Telemetry device (TBS Core Pro for example) disarmed and is preventing arming | 15 | 16 | 16 | 15 | Refer to the manual for your hardware. |
MSP |
MSP connection is active, probably via Betaflight Configurator | 16 | 17 | 17 | 16 | Terminate the Betaflight Configurator connection (disconnect). |
PARALYZE |
Paralyze mode has been activated | 18 | 17 | Power cycle/reset FC board. | ||
GPS |
GPS rescue mode is configured but required number of satellites has not been fixed | 19 | 18 | Wait for GPS fix or disable GPS rescue mode. | ||
RESCUE SW |
GPS Rescue switch is in an unsafe position | 19 | Turn off the GPS Rescue switch to arm. | |||
RPMFILTER(2) |
Motor RPM-based filtering is not functioning | 20 | One or more ESC’s are not supplying valid RPM telemetry. | |||
ARMSWITCH |
Arm switch is in an unsafe position | 17 | 18 | 20 | 21 | Toggle the arm switch to arm. |
(1) This may appear on the Betaflight OSD during flight, take it as a sign that your radio system is either faulty or you are flying at the edge of your range. Treat it the same you would an “RSSI critically low” warning.
(2) RPM-based filtering is enabled but one or more ESC’s are not supplying valid DSHOT telemetry. Check that the ESC’s are capable of and have the required firmware installed to support bidirectional DSHOT telemetry.
Most up to date ARMING_FLAG list can be found in the current BetaFlight source code: https://github.com/betaflight/../runtime_config.h#L37-L60
Parts of this article taken from Betaflight Wiki
History:
2018-05-31 article created
2019-03-19 updated table to betaflight 4.0
-
 ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware,
ESC Firmware Guide
In this concise overview, we’ll explore the evolution of ESC (Electronic Speed Controller) firmware, -
 List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description
List of brushless whoop/toothpick flight controllers
This is the list of brushless tiny whoop/toothpick style flight controllers with brief description
I am getting arm codes 17 and 18. I know 17 is due to my connection to BF, and I know 18 is due to the “arming switch in an unsafe position”. My arming switch is a 3-position switch and it shows 1000, 1500, and 2000 in the receiver tab. Any ideas?
Check if the ARM SWITCH is working in the
MODEStab. ARM mode box should turn into yellow when toggling the ARM SWITCH.Well i finally get the receiver mode set and ports set but i get a Arming disabled flag of Rx CLI. The R-XRS Recever shows green LED with solid Blue Led. My T12 shows 4 bar, the FC blue led is flashing all the time and when i power up it beeps 5 times. In iNav the receiver page has all channels shown but still does not change with stick or switch. I watched a couple of your vids on flags and but still cannot fix this problem. At the top of the page on iNav the Fail safe indicator is always red. Thanks again for any any help with this problem.
Regards
Johnny Johnson
When resolving the arming issues, first you need to resolve the most significan arm disable flag. In your case it is RX LOSS. This means Flight Controller doesn’t see your receiver. Probably the RX configuration is not correct. You need to set the Serial RX configuration correctly. You should see the bars move according to your sticks movements under the Receiver Tab in BF/iNav configurator. If your FC MCU is F4, then you cannot set SBUS inversion in configurator, you need to have F4 FC with inverted SBUS input. You might need to hack your RX for uninverted SBUS signal (search: https://www.google.lt/search?q=r-xsr+uninverted+sbus) if your FC has no SBUS inverted input. On F3 FC both – inverted and uninverted SBUS signals work as F3 MCU has ability to invert the serial signal by itself.
I know its the most tricky part of the quad setup – connecting Serial RX and setting it up to work. Try to search for the help and tutorials on setting up the RX with SBUS signal.
Hi, I have a Hawk 5. The version is BF 3.2.2, I have notice that the sequenze of beeps of warning is different than my Kopis 2 with BF 3.4. The beeps of Hawk can’t be calculated as (5 * ) +
ex. Flags 7, it will emit: 1 long and 1 short beeps x 7times. It’s normal that in this version 3.2.2 the metod of calculation is different? Or can be a bug of FC? Sorry about my English language. I’m Italian. Thanks
The arming disable flag numbering (also the warning beeps) were changed from the BF version 3.2 to 3.3. For instance ANGLE flag (craft is not leveled enough) is number 7 in BF 3.2 and was changed to number 8 in BF 3.3. So it is highly possible that warning beeps will be different in the older versions of the BF (3.2 and older).
Update at least to the BF 3.4 to have the best performance.
I keep getting “system load to high for safe flight” but I’m only at 6% and it comes and goes too. When this happens I. Betaflight when I move the copter around it reacts very slowly in the 3d model.
Disable all the features you don’t need, disable baro, mag, accel if you fly acro. Flash the latest BF version. It also can indicate the problem with FC board. Maybe Gyro is failing?
Hi, I have a Vortex 230 Mojo with a new FC and PDB and it’s got standard BF 3.2.2 on it. When I connect it, its got 2 long beeps and 1 short beep, which would mean it’s still calibrating. But it will never stop calibrating though, and the video feed is all black, so it’s outputting something but only black. I have tried updating the firmware to the latest BF released by the manufacturer (ImmersionRC), but nothing seems to work. When typink status in CLI I get a I2A error 1. I think the Gyro is corrupt? Also my RC channels are suddenly mixed up. Throttle and Yaw are mixed, and channel 2, 5 and 6 move at the same time when switching one switch. Anybody has an idea what’s going on?
I’m not familiar with Vortex 230 Mojo, but quick research says it has I2C gyro, and that would mean that there is a problem with this subsystem. Also this board looks to have dual MCU one is probably used for video/osd subsystem. Malfunction of this could lead to blank video in the output…
Hard to advise something as I have no experience with it.
I just built my first quadcopter. I’m arming it in betaflight and I’m getting an arming flag 16. I read what a 16 flag is and have pretty much no clue what is going on. If someone could help it’d be much appreciated. I have a Kakute 4v2 FC.
Most likely (it depends on the version of BF) Flag 16 is MSP flag. Betaflight does not allow to arm the quad while connected to BF Configurator for safety measures. The only option to spin the motors while the Configurator is connected is to remove the propellers, go to Motors tab and test the motors there with the sliders.
I’ve done all these steps and still can’t arm could it be the rx? It shows commands on beta flight No matter what steps I’ve taken I can’t get rid of cli msp
MSP and/or CLI flags are always present when you are connected to the Betaflight Configurator. You cannot arm when you are connected. Please check the Receiver tab – does the bars correspond to your stick and switch movements? Do you have throttle in the right channel? Do you have working Switch and assigned to the ARM mode in the Modes tab?
no matter what i do, quad will not arm. still showing “throttle” for arming flag. in receiver menu, preview quad just repeatedly rolls and rotates, even though I am not touching the throttle or any other stick. values for yaw, pitch, roll, and thrust are all set to standard between 1000-2000. any help would be appreciated
Check the channel order. The radio channel order should match the FC channel order. Ussually they are AETR or TAER.
FIX: I was struggling to try to get my TinyHawk Freestyle 2 to ARM and all Flags in BetaFlight were showing no problems (besides MSP which is normal when checking other flags via BF). The one thing that solved my arming issue was in BetaFlight, go to the OSD section and disable (uncheck) the Warnings ‘Arming Disabled’. So excited to fly now, unfortunately, this took 2 hours to figure out and now it’s dark out SMH…
Interesting info. Thanks for sharing
FIX Update: Looks like the initial fix I posted was a fluke. It just worked intermittently when I changed that setting 3 times in a row. But after I posted this, the 4th time wasn’t a charm. However, I now can say with confidence that the new discovery may be the smoking gun. I had a R9 MM-OTA Rx installed ono the Tx2/Rx2 pads, but because I can’t seem to pair it I’ve been using the stock TinyHawk Freestyle 2 SPI Rx. After de-soldering the R9 MM, it works like a champ now…famous last words 😉
Thanks for followup. Yes this makes more sense as OSD settings have nothing to do with the ARMing the quadcopter.
We have a Tiny Hawk. When we try to arm, it arms for a slit second, spins. and then gives a runaway warning. We made sure the props are spinning in the right direction.
Check in the betaflight configurator if your props are set to spin in normal or reversed (props out) mode. Also check the gyro orientation setup by visual quad position inspection on the first page of the betaflight configurator.
Bonjour
J’ai le “paralyse mode actived”
Je ne sais pas comment résoudre ce problème
Marci de votre réponse et aide
Hello,
Most likely you have PARALYZE mode activated. Go to the Betaflight modes tab and delete the PARALYZE mode or set it to the free AUX channel with the right range.
hola
no puedo arm mi beta95xv3 conecto el dron al pc y en la opcion de calibrar giroscopoio no aparece pero si la tengo activada y cuando meto status en CLI me aparece
Arming disable flags: NO-GYRO
no tengo idea de como solucionar si alguien puede guiarme yo feliz ya que estoy desesperado
Hi, you most likely have defective flight controller. Arming disable flag NO-GYRO means Gyroscope chip is faulty or FC board is faulty. If you have tried to update the Betaflight firmware then this error can occur if you select the wrong hardware target for flashing.